 客服热线:
客服热线:











| 品牌宙达机器人 | 有效期至2028-04-26 |
| 导航SLAM导航 | 视觉TOF |
| 浏览次数289 | 最后更新2020-04-07 08:33 |
宙达机器人SLAM模组
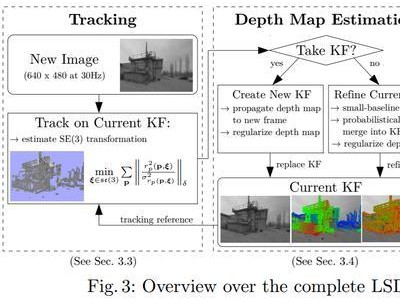
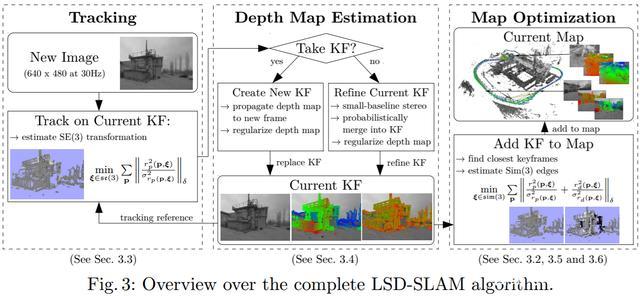
宙达机器人SLAM:即时定位与地图构建 Semantic Map是一种储存知识的格式,将物体和场景的知识对应到地图场景中的位置,建立环境和物件之间的关系(下图),进而能够提供给机器人在环境中执行较为高阶的工作,其中直接使用的模组包括移动机器人在空间中的导航(Navigation)、避障(Collision Avoidance)、定位(Localization)和建图(Mapping)、机器手臂轨迹规划(Path Planning);人机互动等。


2.采用TOF技术。如同我们机器人的眼睛,应用于避开障碍物、建立SLAM、确认物品位置、栈板位置、插取预备位置是否正确、是否应该继续插取货物、行走等判断


 企业资料通过已通过本站机构认证认证
企业资料通过已通过本站机构认证认证 
&tel=15023007393&work=15023007393&email=shikangjie@zouda.vip&org=重庆宙达机器人科技有限公司&adr=重庆市沙坪坝区回龙坝镇西溪桥村西溪坝13社&url=http://zouda.agvline.com/)














